
Pour un projet avec un peu de robotique nous avons décidé de nous lancer avec le Raspberry PI et les moteurs pas à pas.
La mise en route s’est faites sans souci (Raspberry Pi 2 model B).
Si vous avez comme moi une contrainte sur le nombre d’écrans disponibles, je vous conseille d’activer le XDMCP et de prendre la main a distance. Pour cela installer Xming ou MobaXterm si vous êtes sous Windows, puis activer le XDMCP sur le raspberry (voir ce tuto)
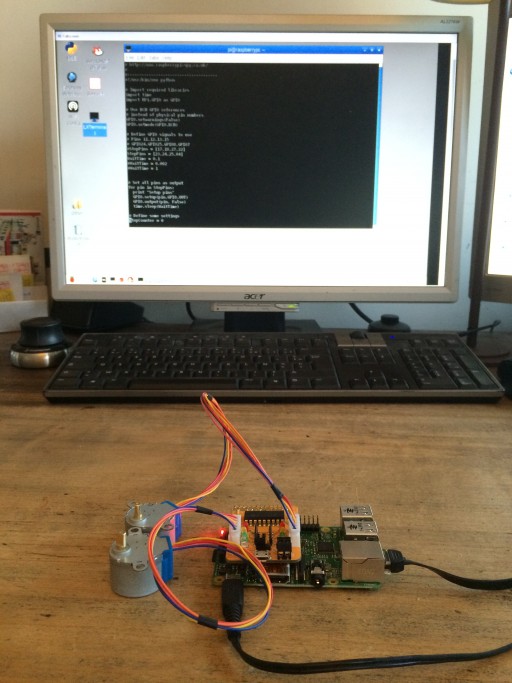
Ensuite j’ai connecté une carte PiStep 1.1 Dual Stepper Motor Control Board et deux moteurs pas à pas 28BYJ48
Ensuite le code python décrit ici pour le faire fonctionner.
Ça marche aussi très bien sur ScratchGPIO avec l’exemple PiStep/Steptets01.
Et voila, ça tourne !
Quelques points clés découverts :
– Le connecteur de le la carte Pi Step est moins grand que celui du Rasberry Pi. Celui du Raspberry a augmenté lors d’une évolution de version mais les carte de petit format restent compatibles. Il faut la caler du coté de la broche zéro.
– Ces moteurs permettent des pas d’un 64eme de tour. Au début j’ai même cru qu’il ne tournaient pas … Attention la vitesse maximum sera de 5 a 6 secondes pour un tour complet !
– Ces moteurs sont aussi vendu avec une carte ULN2003. Deux cartes remplacent alors facilement la carte PiStep, et ceci moins cher.
– Sur la carte PiStep, il faut connecter un jumper pour forcer l’alimentation sur le 5V et non sur une alimentation externe.
Projet à suivre !
Fabmanager chez Les Fabriqueurs
gregoire @ fabriqueurs.com