Suite de l’article précédent: mise en place de « butées électroniques » sans contact (des « End-Stop ») pour couper le moteur lorsque le pilote arrive en bout de course d’un coté ou l’autre pour protéger le pilote (en permettant le fonctionnement dans l’autre sens).
Circuit Electronique:
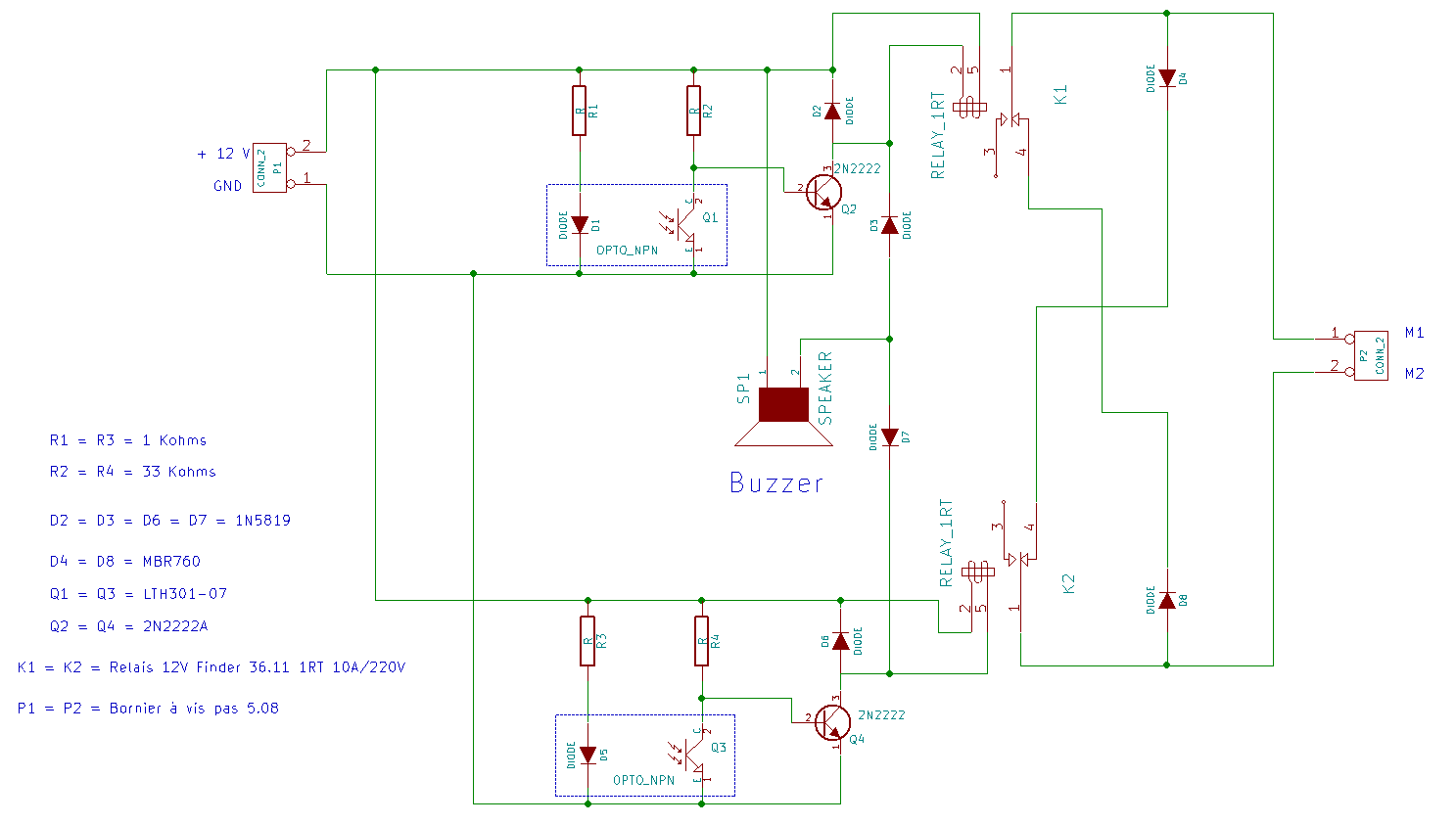
On utilise un capteur optoélectronique infrarouge à fourche pour détecter la fin de course dans chaque sens. En dehors de la fin de course la diode infrarouge « éclaire » le phototransistor qui est alors passant et ramène la base du transistor 2N2222 au potentiel de la masse et il est alors bloqué et le relais est désactivé. Même chose pour l’autre butée et les diodes Shottky D4 et D8 laissent circuler le courant moteur dans un sens ou dans l’autre, conformément au fonctionnement normal du pilote.
Mais en fin de course (schéma du haut) le phototransistor est bloqué (une lame plastique solidaire du chariot vient l’isoler optiquement de la diode) et la base du transistor est ramené au +12V par la résistance R2, le transistor devient passant et active le relais. Le circuit est alors ouvert et le courant moteur ne peut circuler que dans un seul sens grâce à la diode Shottky D4 (le phototransistor du bas est passant donc le relais du bas est désactivé) et le moteur va pouvoir être alimenté pour tourner et déplacer le chariot dans l’autre sens lors de la modification de la commande. Dans l’autre sens de déplacement (partie basse du schéma), le fonctionnement est similaire.
Les diodes D2 et D6 sont des diodes de « roue libre » (diodes Shottky rapides) pour protéger les transistors des surtensions produites à l’ouverture du circuit du relais (dues à la self induction de la bobine).
Le buzzer prévient l’utilisateur que le pilote est arrivé en butée.
Ce type de solution peut être utilisé sur des machines (en utilisant simplement la tension du collecteur du transistor comme signal de fin de course − résistance 10KΩ entre 12V et collecteur, éventuellement remplacée par une led et une résistance −).
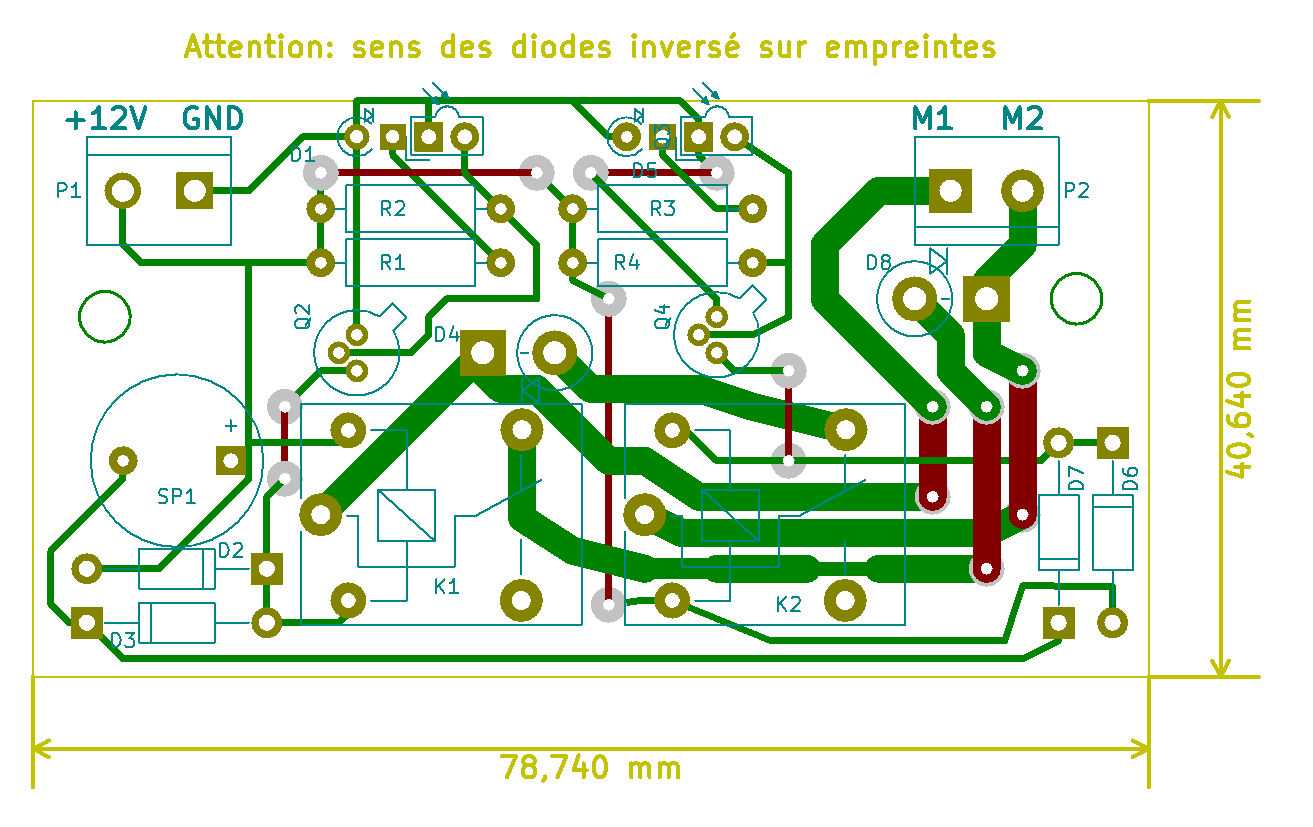
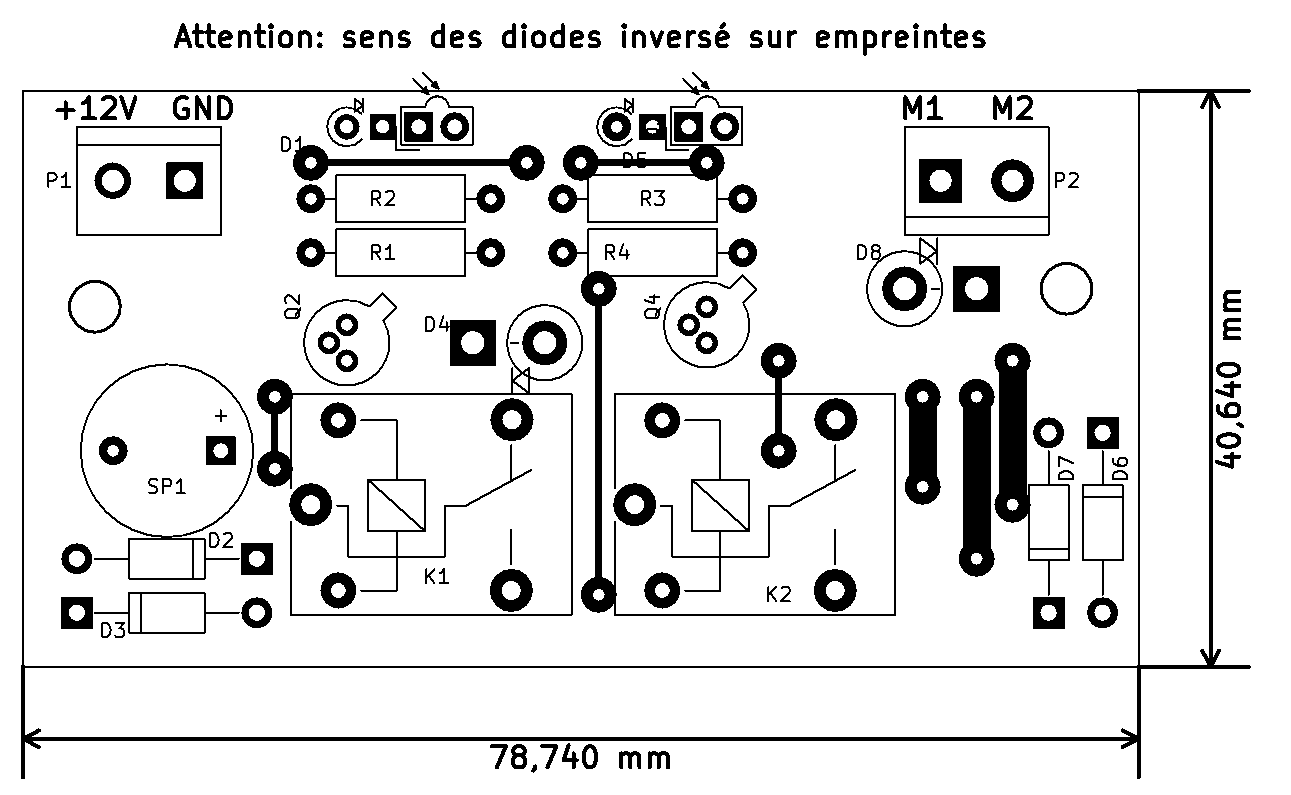
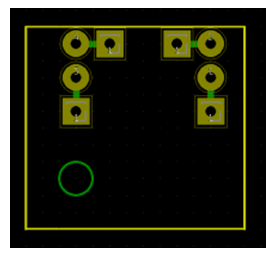
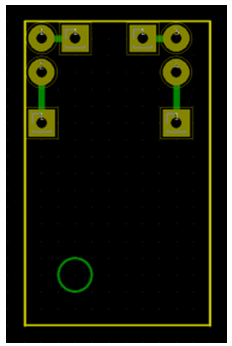
Le circuit imprimé dessus / dessous:
Expérimentation de l’étage de détection Optocoupleur → Transistor + Buzzer (6V)
R1 = 1KΩ calculé pour avoir IF = 20 mA → à affiner pour avoir la consommation mini
R2 = 47KΩ (calculée) ou 33KΩ (expérimenté)
Les buzzers achetés (12V) sont trop faibles, par contre un buzzer 6V donne un son suffisant.
Impossible de mettre un relais sur une « planche à pain » à cause de la dimension des pattes. A vérifier son activation par le transistor!

Le PCB terminé fonctionne.
Test du circuit: on court-circuite les bornes du phototransistor: quand on enlève ce strap le relais doit coller et le buzzer doit sonner.
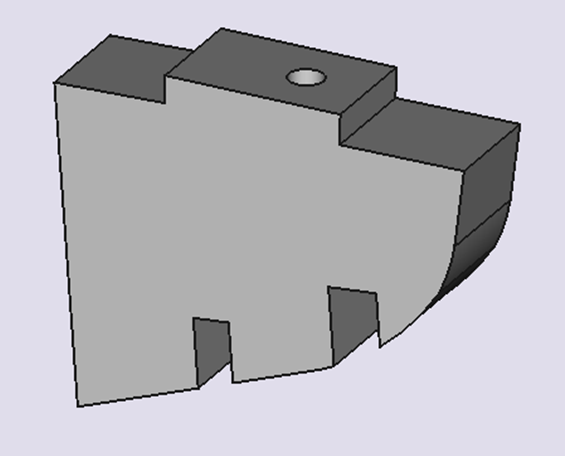
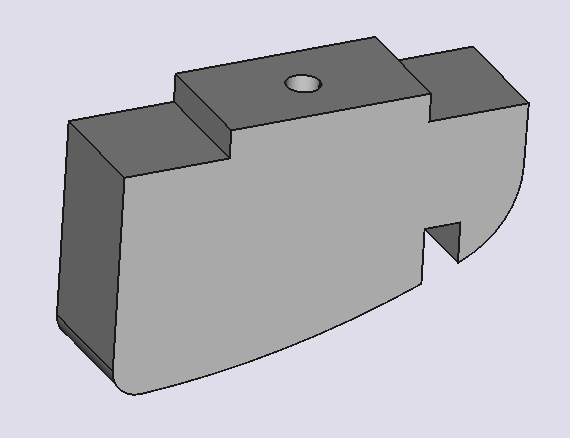
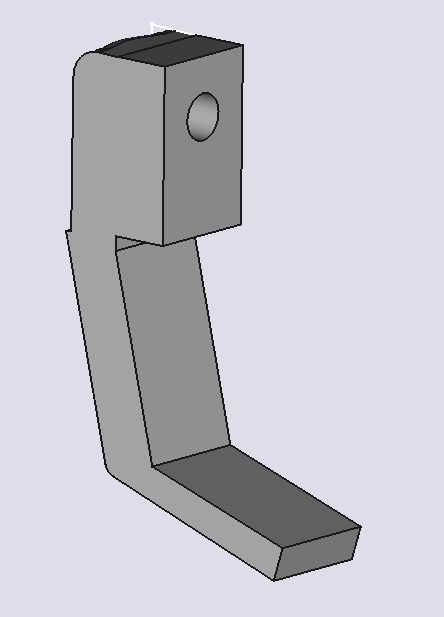
Supports de PCB: (réalisés avec une imprimante 3D en PLA)
- Support-AV5-Pilote-Support-CI-AV_V4-2.stl
- Pilote-Support-CI-AR_V6.stl
Optocoupleurs:
![]()

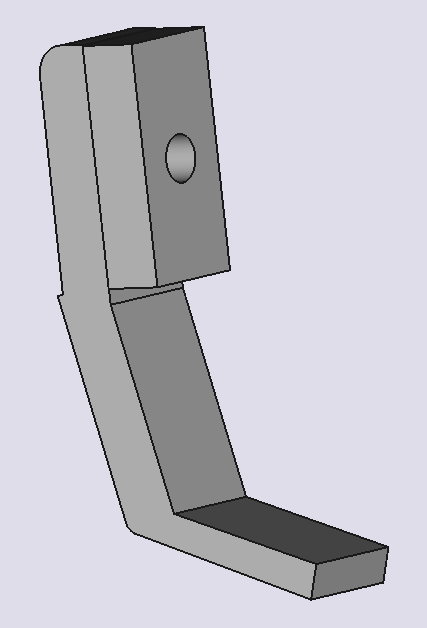
Supports Opto-coupleurs:
- Support-Opto-AV3.stl (sous Kicad : support_Opto-AV3.FCStd1)
- support_Opto-AR6.stl (sous Kicad : support_Opto-AR4.FCStd1)
les supports seront collés à la colle cyanocrylate gel.
Capteurs assemblés et les lamelles du chariot :


Les lamelles d’activation des capteurs sont réalisées dans une feuille d’aluminium provenant d’une boite de conserve (non magnétique − Présence du compas du pilote −).
Toutes les vis utilisées sont en acier inox A4 pour la même raison.
Au vu du matériau du chariot (Polypropylène ou polyéthylène) les seules colles qui semblent utilisables pour coller les lamelles sont la colle cyanoacrylate Loctite spéciale plastique (avec primaire d’accrochage) et la colle néoprène.
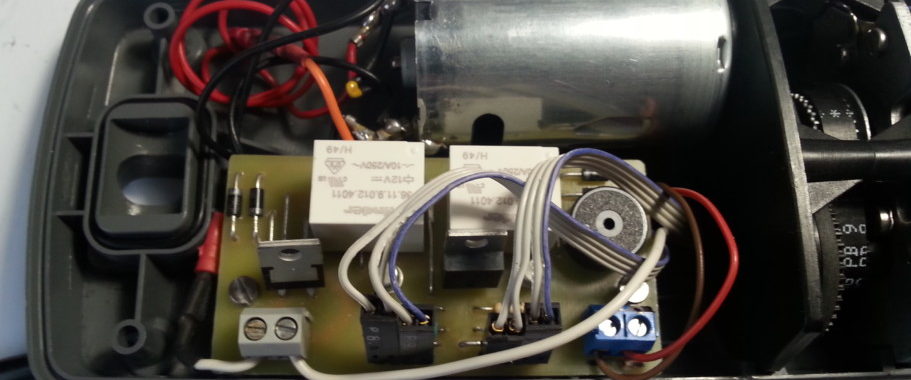
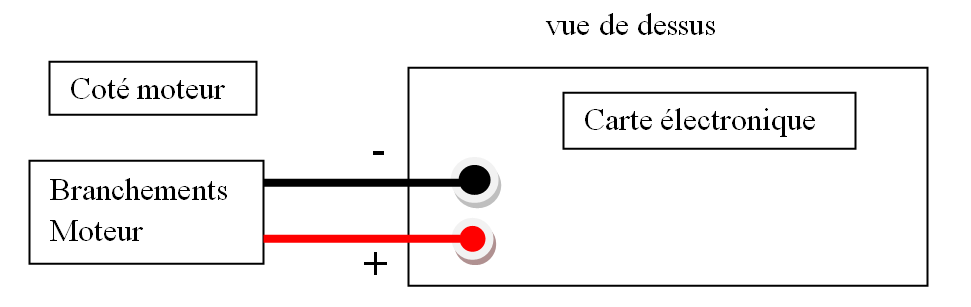
Carte électronique avant déconection des fils moteurs (pour le câblage final):
Pour faire passer les câbles des capteurs, il faut faire des découpes sur le boitier du pilote et le support moteur:


Assemblage :
Collage des supports de capteurs, collage de la platine avec ses supports dans le boitier.



Mise au point:
- Vérification du fonctionnement des capteurs (Bread board + transistor + led): lamelle mise ou pas entre diode et phototransistor,
- Vérification avec câblage à la platine: activation des capteurs et vérification de l’activation des relais (chariot en position médiane, activation des capteurs « à la main »).
- Câblage complet de la carte du pilote, du moteur et de la platine.
- Le câblage respecte le pilote orignal (pas de câble coupé, le moteur peut être connecté sur la carte pilote au cas où).
Les composants de la carte du pilote ne permettent pas le passage du chariot équipé des lamelles d’activation des capteurs !!!!!
=> Déplacement du capteur arrière coté moteur, les condensateurs de la carte faisant encore obstacle, montage des lamelles à la partie inférieure du chariot; la position des capteurs permet d’utiliser une seule lamelle. Modification des PCB capteurs et du support opto arrière (support_Opto-AR7.stl et Supports_Opto.pro sous Kicad).



- Détermination (mesure) de la course du chariot après activation du capteur: lamelle en position avancée fixée avec du scotch (pour ne pas entrer en butée sur les joints toriques) et repérage de la position d’activation du capteur. Plusieurs essais pour chaque capteur. Course à vide = différence de position.
- Collage provisoire des lamelles de capteurs sur le chariot (scotch) et contrôle des déplacements. Puis collage définitif avec colle cyanoacrylate Loctite spéciale plastiques.
- Vérification en fonctionnement normal du pilote (manuel et automatique), ajustage vertical des capteurs.

Attention à l’alimentation du pilote pendant les tests, une alim insuffisante entraîne un disfonctionnement (affichage « 2000 » à la mise en route et à chaque appui sur un bouton du pilote).
Règle qu’on oublie souvent : utiliser une alimentation adéquate voire surdimensionnée !!!
Tous les fichiers électronique sous KiCad et ceux pour imprimante 3d sont disponibles : pour les « Fabriqueurs », ils sont dans la « Dropbox », pour les autres sur demande.
Gaston
(gaston.etienne@free.fr)
BONJOUR
Même problème, pilote endommagé suite à une mise en butée.
Pouvez vous me transmettre le schéma électronique, car je souhaite réaliser votre belle réalisation qui me parait trés intéressante pour augmenter la fiabilité de ce pilote.
D’avance je vous en remercie.
Respect !!!!
Très bien merci
Mais si on utilise 2 mini fin de course mécanique et 2 diodes mbr 760 en parallèle des fin de courses chacun sur chaque fil du moteur un pour le « + » et un pour le « -« . Ca serait plus simple a monter. Je vais l’expérimenter
bonjour je suis de cholet(49) est-il possible de recuperer les plans electrique pour plus de lisibilite